FRACTRAN
Published:
Programmed an interpreter to play around with FRACTRAN, Conway’s Turing-complete esoteric programming language.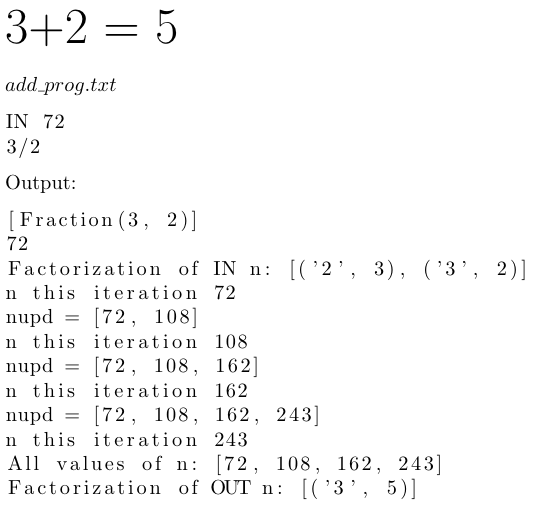
Published:
Programmed an interpreter to play around with FRACTRAN, Conway’s Turing-complete esoteric programming language.
Published:
This was a toy problem that investigated the development of a stealthy search algorithm that minimizes exposure of the object under consideration to ‘areas of consequence’ on the grid. Areas of consequence could range from capture zones in games to operational range of missiles and mines. In this solution, I elected to use a cost minimizing algorithm, specifically, A* search with a custom-made heuristic. This heuristic evaluates the minimum Euclidean distance to an obstacle on the grid from the node under study and then subtracts it from the Euclidean distance to the destination node. The result is assigned to the priority of the node in the priority queue used in the A* search. 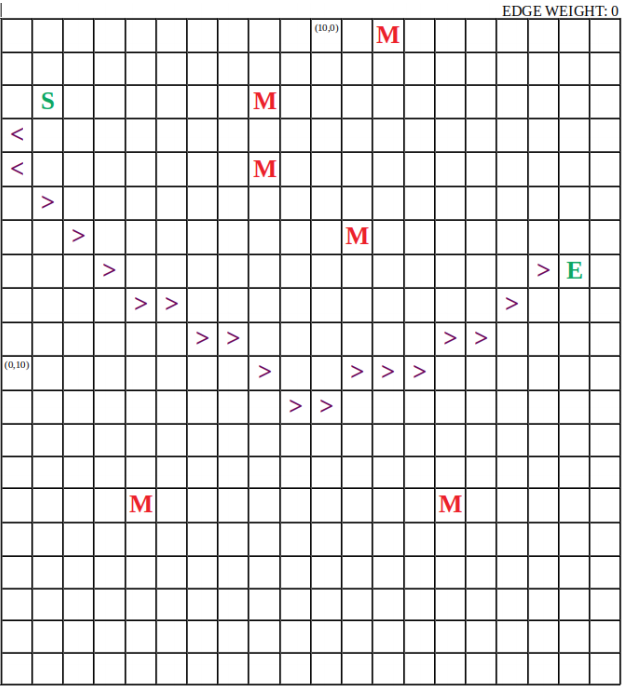
Published:
The purpose of this project was to design a self-powered flow velocity sensor. The sensor is different from state-of-the-art implementations of flow rate sensing in that the mechanical design is not only smaller but also optimized for a larger range of flow velocity measurements. The sensor is also able to rectify input voltage signals, charge a battery, power an Arduino and have the ability to be calibrated easily. While this sensor is designed for civil applications (plumbing and piping systems), the mechanical design could be very easily altered to accommodate for flow sensing in water bodies (rivers, ocean currents, etc). 
Published:
My senior design team designed a swerve drive module for one of the robots I personally worked with for my research (affectionately named “Scrat”). Scrat is a non-holonomic, pseudo- omnidirectional robot designed to traverse laboratory floors to detect alpha radiation contamination. This project was inspired by Scrat’s several design issues: poor tire traction, no suspension, poor encoder resolution, and large gear backlash. In light of these issues, the team’s goal was to design, test, and manufacture a new wheel module with an accurate steer system and functional suspension while remaining within a $3,000 budget. We made detailed CAD models, a full BOM with references to vendors, detailed assembly instructions, and a 3D simulation. Unfortunately, the actual machining and assembly of the module was not possible because of the COVID-19 pandemic. However, this design has been successdully implemented.
Published:
This project was developed with my long-time friend, Sai Kasam, as a fun summer project. It is a community driven rating system that helps evaluate the, (1) Social Distancing, (2), Communications (from/at the location), (3) Use/Availability of Personal Protective Equipment (PPE) at most public areas/locations/businesses in the world. These individual scores are averaged to get the final location’s overall COVID Safety Score. All functionality in this website can be accessed with just a few clicks. By entering a place into the search bar above, you can access the location’s rating, read other user reviews, and rate the location if you have an experience you would like to share. ![]()
Published:
This project develops a method to improve the performance and flexibility of microcontroller (MCU) on-device binary image classification (MobileNetV1) by implementing online on-device transfer learning. Given the necessary energy, memory and compute efficiency, training deep networks on MCUs seems far-fetched and near impossible. Instead, online transfer learning is an implementable edge learning mechanism that can make use of the feature detection capabilities of a well-trained frozen base model without having to gather/store/access large datasets and parameter values on device. 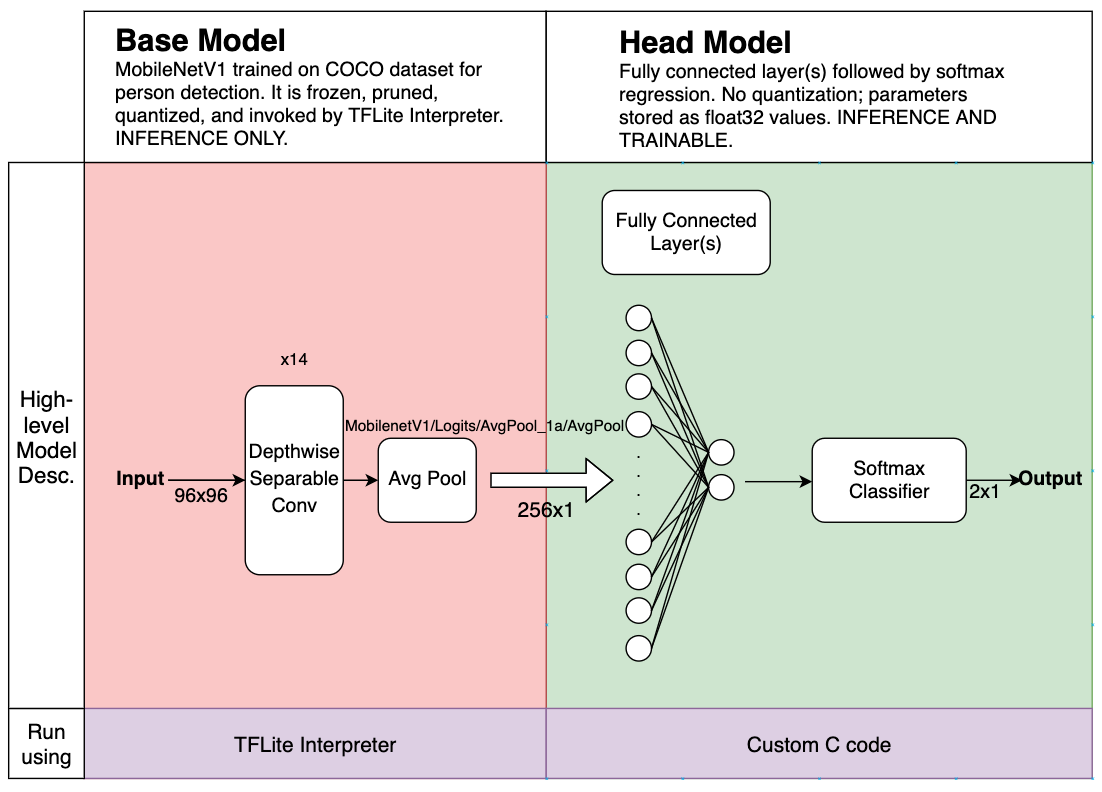
Published:
In this paper, we present the equivalence of Fenchel and Lagrangian duality. Then, for the problems of concave maximization and convex minimization, we show that the Lagrange multiplier is indeed equal to a particular constant used in Fenchel duality.
Published:
Learning-theoretic work on extending fundamental RL algorithms to LQR Adaptive Control has recently (over the last decade) received more attention. Inspired by the significant progress made independently in RL and adaptive control, this fusion of approaches shows significant promise with potential applications in robotics, plant operations, and game theory (to name a few). This survey is intended to provide the reader with an overview of the recent algorithms and significant theoretical results obtained in extending RL to LQR Adaptive control. This study is done with regards to the benchmark discrete-time, infinite-horizon LQR with unknown dynamics. Regret analyses are presented, and detailed discussions that compare and contrast the methods are provided.
Published in ASME 2019 Dynamic Systems and Control Conference, 2019
This article presents a novel kinematic model and controller design for a mobile robot with four Centered Orientable Conventional (COC) wheels. When compared to non-conventional wheels, COC wheels perform better over rough terrain, are not subject to vertical chatter and offer better braking capability. However, COC wheels are pseudo-omnidirectional and subject to nonholonomic constraints. Several established modeling and control techniques define and control the Instantaneous Center of Rotation (ICR); however, this method involves singular configurations that are not trivial to eliminate. The proposed method uses a novel ICR-based kinematic model to avoid these singularities, and an ICR-based nonlinear controller for one ‘master’ wheel. The other ‘slave’ wheels simply track the resulting kinematic relationships between the ‘master’ wheel and the ICR. Thus, the nonlinear control problem is reduced from 12th to 3rd-order, becoming much more tractable. Simulations with a feedback linearization controller verify the approach.
Download here
Published in Texas ScholarWorks, UT Austin, 2020
My undergraduate honors thesis, which considers the modeling, control and path planning of wheeled mobile robots with four Centered Orientable Conventional (COC) wheels
Download here
Published in arxiv, 2020
This article presents an approach to encode Linear Temporal Logic (LTL) Specifications into a Mixed Integer Quadratically Constrained Quadratic Program (MIQCQP) footstep planner. We propose that the integration of LTL specifications into the planner not only facilitates safe and desirable locomotion between obstacle-free regions, but also provides a rich language for high-level reasoning in contact planning. Simulations of the footstep planner in a 2D environment satisfying encoded LTL specifications demonstrate the results of this research.
Download here
Submitted to ACC, 2021
We consider large scale distributed optimization over a set of workers connected to a central server, where the limited communication bandwidth between the server and workers imposes a significant bottleneck for the optimization procedure. Inspired by recent advances in communication-efficient federated learning, we propose a distributed SGD-type algorithm that exploits the sparsity of the gradient, when possible, to reduce communication burden. At the heart of the proposed algorithm is to use compressed sensing techniques for the compression of the local stochastic gradients at the worker side; and at the server side, a sparse approximation of the global stochastic gradient is recovered from the noisy aggregated compressed local gradients. Theoretical analysis shows that our proposed algorithm is able to achieve favorable convergence rate compared to the vanilla SGD even in the presence of noise perturbation incurred by the communication channels. We also conduct numerical experiments of training residual networks on the CIFAR-10 dataset to corroborate the effectiveness of the proposed algorithm.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.